权威解析


24小时热点

公开决裂?洪森4小时超长直播指控:他信父女背叛我、背叛泰国
2025-06-28 07:50:07
日本肺都要气炸了
2025-06-27 09:28:38
美国威胁中国再敢发射导航卫星试试,中方:试试就试试! 坚定反制毫不退缩
2025-06-27 15:10:53
记者:泰国军方把佩通坦架在火上烤 边境赌场争夺战引爆政坛
2025-06-27 16:17:41
印度为何跟上合组织唱反调 拒签公报引发孤立
2025-06-27 17:43:58
“9·3”大阅兵,会亮相哪些新型作战力量? 无人智能引领未来战场
2025-06-28 09:48:21
专家观点









学成归国的她致力于机器人研究 探索柔性机器人的广阔未来(2)
面向未来,柔性机器人前景广阔,但研究仍处在起步阶段。作为科研工作者,赵慧婵希望通过在柔性机器人领域的基础研究和关键技术突破,开辟出一条新的道路,做出更具颠覆性的原创性成果。她认为科研需要不断地重复search,可能100次探索只有一次成功,但这一次成功可能会颠覆一个行业或领域,改变人类发展的进程,这需要一代又一代人的不懈努力。
作为教师,赵慧婵也希望能培养更多学生,让他们站在前人的肩膀上继续向前走,为社会进步作出新的贡献。
学成归国的她致力于机器人研究!(责任编辑:卢其龙 CM0882)
(责任编辑:卢其龙 CM0882)
关闭
精选推荐

4架苏34被毁,俄媒怒了:把责任人送去前线当炮灰
2025-06-29 08:48:09
中美已签署协议,特朗普主动“邀功”,中国用稀土换美国取消制裁 稀土成关键筹码
2025-06-29 08:51:53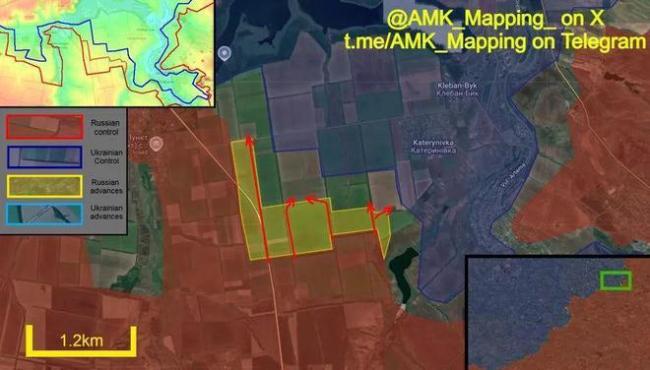
乌军新帕夫利夫卡防线崩溃!俄军推进势如破竹
2025-06-29 14:00:03
俄乌冲突即将迎来大结局吗 和平曙光初现
2025-06-29 08:49:45
歼15驱离外军战机背后透露哪些信息 彰显中国海军实力
2025-06-29 18:52:04
韩国瑜站台反罢免活动 保卫战与守护台湾
2025-06-29 10:02:27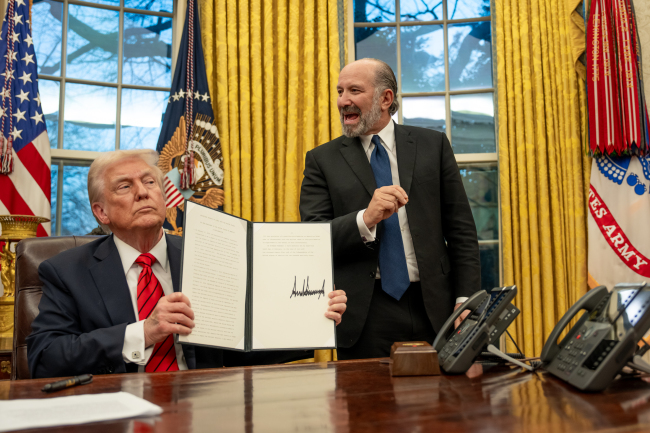
美国“对等关税”生效倒计时 贸易逆差创纪录
2025-06-29 14:01:27
以方筹划15年 美以消耗大量“萨德”导弹 伊朗举行国葬悼念遇难者
2025-06-29 09:21:06
经中央军委批准,海军山东舰航母编队将访问香港 开展开放参观和文化交流
2025-06-29 10:04:42
马英九结束大陆参访行程 推动两岸交流获肯定
2025-06-29 17:24:58