权威解析


24小时热点

以对叙首都空袭 叙利亚领导人发声 指责以色列挑起争端
2025-07-17 14:09:29
满载排水量13万吨?大连造船厂的神秘分段,是004型核航母吗?
2025-07-17 16:34:52
德国闹了一个国际大笑话
2025-07-11 09:22:43
中国正研发13万吨级航母?博主解读
2025-07-17 14:20:50
记者:叙利亚混战升级 多方势力介入加剧冲突
2025-07-17 07:38:13
是不是忘记解放军的大杀器了?
2025-07-17 16:24:14
专家观点









中国超大型水下无人潜航器亮相中东防展(4)
又比如,我们在艇体上方增加了一个横贯艇体舯部的“背鳍”结构,估计可以用于容纳一部分态势感知系统、通讯系统和信号系统等,而“Echo Voyager”的背部相对平整;
再比如,我们的“CSSC-705”型潜航器尽管和“Echo Vayager”同样使用了X型艉舵加上大七叶倾侧螺旋桨设计,但并没有类似于波音公司产品的螺旋桨外涵道。

但是无论如何,随着“CSSC-705”型XLUUV在阿布扎比首次公开,咱们可以这么说吧——这是首款使用了“牛头艏”和X型艉舵设计的中国水下作战装备,意味着相关技术已经被我们全面突破。那么接下来,这种技术是否会转用于其它水下作战装备的研发,就值得期待了。

而在咱们这款无人潜航器的任务模块设计上,起码按照目前公布的信息,可以发现我们的这款“CSSC-705”,无论是相比“Orca”还是“Echo Voyager”,似乎有着比较根本的区别:
美国的这两款潜航器,似乎比较强调任务系统的模块化设计。比如从公布的照片来看,无论是“Orca”还是“Echo Voyager”,看不出明显的、安装在艇体表面的水声探测系统或者武备系统等。只有维持航行的船电设备和态势感知单元,比如光电桅杆、防撞声呐和摄像头等。
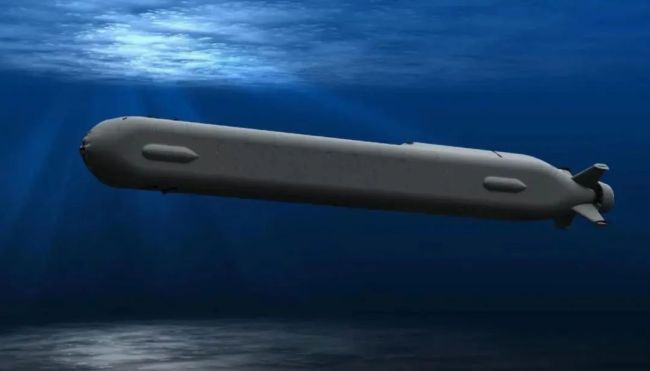
而我们的“CSSC-705”,在艇体上部配备了光电桅杆,这个显然就不用多说了。但是在艇体舯部,我们的“CSSC-705”明显配备了一组舷侧多线声呐阵列,每一侧都由9个水听器模块组成。这似乎预示着该型超大型无人潜航器具备较强的水下态势感知性能,而非如美军的XLUUV一样,比较强调潜航器的模块化任务舱和多用途性能。
(责任编辑:)
关闭
精选推荐
以对叙首都空袭 叙利亚领导人发声 指责以色列挑起争端
2025-07-17 14:09:29满载排水量13万吨?大连造船厂的神秘分段,是004型核航母吗?
2025-07-17 16:34:52中国正研发13万吨级航母?博主解读
2025-07-17 14:20:50记者:叙利亚混战升级 多方势力介入加剧冲突
2025-07-17 07:38:13是不是忘记解放军的大杀器了?
2025-07-17 16:24:14
学者:普京决心打到西方服气为止 无视美方威胁持续推进
2025-07-17 07:38:59
大连造船厂神秘分段是004型核航母吗 中国海军迈向全球部署
2025-07-17 14:42:39
巴铁会把缴获的装备交给中方研究吗 外媒爆料引关注
2025-07-17 11:45:57
专家:朝鲜为俄争取时间 朝俄同盟震动全球
2025-07-17 09:01:53
博主:福建舰战力或超预期 歼-35量产加速
2025-07-17 11:23:49