

24小时热点
专家观点









人形机器人"网球运动员"来了 高动态精准击球
人形机器人"网球运动员"来了 高动态精准击球!网球是人形机器人面临的一大挑战。高速来球要求瞬时判断,全身协调决定回球质量,全场奔跑考验爆发力与控制力。当机器人站上球场,能否像人类运动员一样完成判断、移动与连续回击?
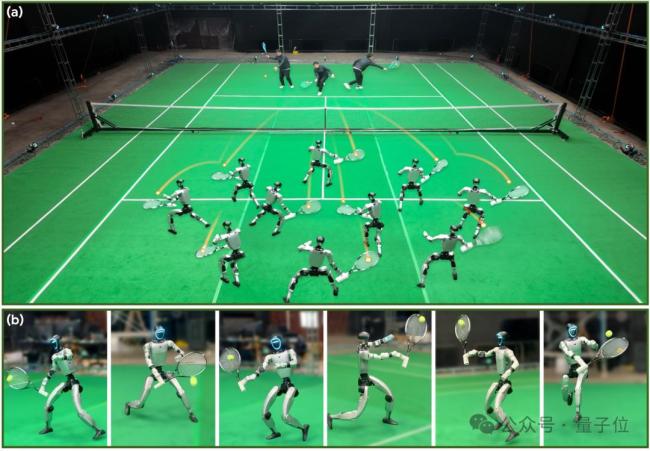
画面显示,机器人迅速调整站位,上下半身协同挥拍击球,并将球精准回击到指定位置。面对各种来球,它能够持续调整身体姿态与击球时机,与不同水平的对手完成多回合对拉。
在高动态、高对抗环境中,机器人需要应对时速超过几十公里的来球、变幻莫测的落点轨迹以及不断变化的击球节奏。更重要的是,这一能力并非依赖预编程动作实现,而是通过深度强化学习自主习得。这是全球首次在人形机器人上实现高动态网球对打,标志着从“机械复刻动作”向“智能决策响应”的跨越。
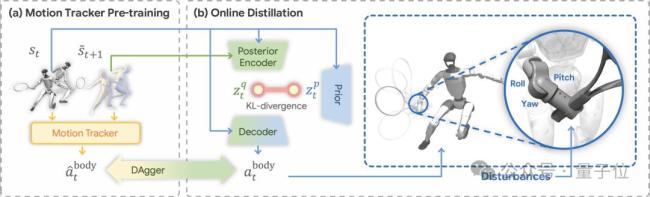
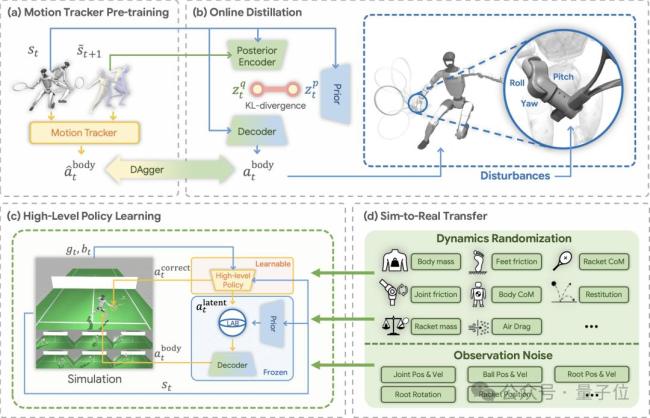
研究团队提出了一种新的机器人运动学习方法,使人形机器人能够从不完美的人类动作数据中学习复杂的运动技能,并在真实世界中完成高动态、高敏捷的网球击球与对打任务。传统的人形机器人运动学习依赖高质量遥操作数据进行模仿学习,但在网球这样的高动态场景中,这类数据几乎难以获取。而通过高质量动作捕捉数据完整记录一场网球比赛涉及的人体运动,则需要高精度、大范围的动作捕捉系统,且非常昂贵。
(责任编辑:)
关闭